
A intervenção em linha de produção ou distribuição de óleo e gás vem sendo desenvolvida pela Upsensor desde a sua criação em 2013. Alguns desenvolvimentos se destacam:
ROBÔ ANNELIDA
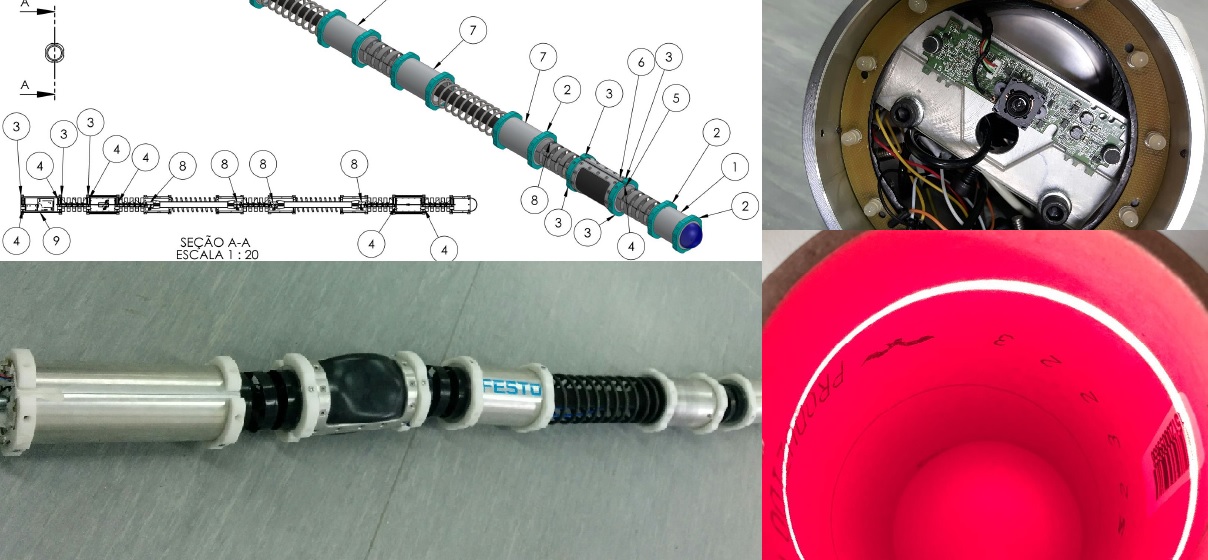
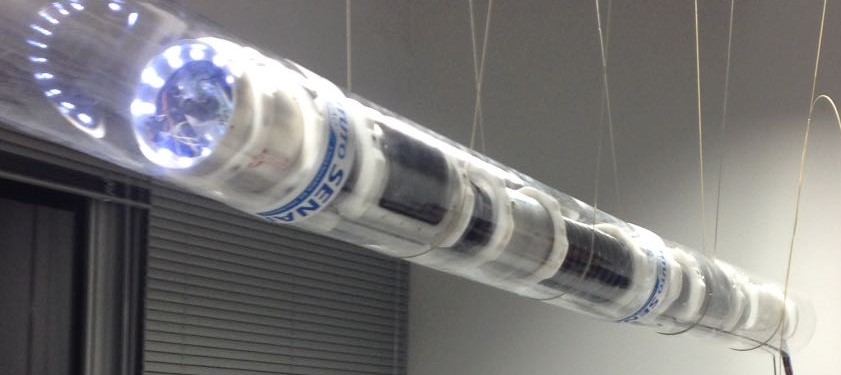
O robô Annelida tem capacidade para realizar além da desobstruções, limpezas e inspeções. A operação poderá ser realizada em linhas de até três quilômetros de profundidade e 15 quilômetros de comprimento. Como imita o movimento da minhoca, o sistema de locomoção do Annelida permite avanço e retorno, além de ter raio de curvatura de 5 diâmetros da tubulação (curva 5D) em linhas de quatro polegadas. A equipe da Upsensor integra o projeto desde a sua origem (através da UFRGS) e como parceira de desenvolvimento em sua segunda fase, desde 2021 (mais informações).

Movimentação interna em risers
Sistema em desenvolvimento, dentro do projeto ANNELIDA, para auxiliar no deslocamento interno nos dutos através de sistema inovador, com estreita parceria com o Instituto Senai de engenharia de Polímeros, através de manufatura digital e aditiva está sendo desenvolvido sistema inovador para o deslocamento. Previsão de testes em campo a partir de 2024.


Sistema para desobstrução de risers
Sistema em desenvolvimento, dentro do projeto ANNELIDA, para executar a desobstrução de risers acoplado a um robô u sem o uso dele. Previsão de testes em campo a partir de 2024.

Detecção de NORM/TENORM
Sistema para detecção de NORM/TENORM para aplicação em linhas a serem descomissionadas. O sistema será integrado a um robô a fim de que o mesmo faça a leitura de potenciais área de concentração de material radioativo, para que a linha possa ser descomissionada ou a seção identificada com a presença de NORM acima do permitido, seja adequadamente separada e condicionada. Previsão de testes em campo a partir de 2024.


G.A.R.I.
O Gabarito Autônomo Robótico de Inspeção procura se diferenciar dos tradicionais sistemas de inspeção através da sua capacidade de controlar a movimentação do sistema de sensores.
O sistema de controle foi desenvolvido através de fomento do Edital Senai de Inovação em parceria com o Instituto Senai Sistemas Embarcados.
A movimentação do robô teve o desenvolvimento através do Edital Senai de Inovação em parceria com o Instituto Senai Engenharia de Polímeros.
A Festo do Brasil suportou os componentes pneumáticos, com destaque para os músculos flexíveis, utilizados na movimentação longitudinal. O Instituto de Informática e Laboratório LAMECC, ambos da UFRGS, participaram do projeto através de consultoria.
Os testes de campo são uma parceria colaborativa com CENPES/Petrobras e BR Distribuidora, em sistemas de distribuição de QAV em aeroportos do Brasil.
Apresentação breve: GARI_v1
Apresentação com vídeo: GARI